Přes veškerou mechanizaci a automatizaci pracovních procesů se neobejdeme bez práce ruky. Práce rukou, vykonávané v různých oborech, mající specifický charakter pracovních úkolů, jsou při jejím výkonu více či méně náročné a bezpečné.
V praxi se k hodnocení pracovní činnosti vychází z obecně známých zásad bezpečnosti práce a principů ergonomie, které jsou legislativně a normativně ošetřeny. To platí i pro případy věnované práci ruky při plnění pracovních úkolů. Přes veškerá stávající opatření, prováděná za účelem snížení úrazovosti a onemocnění rukou, nemůžeme být spokojeni. Svědčí o tom i statistika úrazovosti a nemocnosti rukou. Centrum hygieny práce a pracovního lékařství, jehož součástí je oddělení pracovního lékařství, které mimo jiné činnosti vede Národní zdravotní registr nemocí z povolání, kde zjištěné výsledky na tomto úseku nejsou nijak lichotivé. Obdobně je to s úrazovostí ve statistikách SÚIP. Proto si tento článek dává za cíl osvětlit problematiku, na základě potřebných znalostí a souvislostí „Proč a jak je důležité dbát při práci pro zachování zdravých rukou“.
Úvod
Vývoj ruky společně s myšlením byl podmíněn prací člověka. Ruka (manus) je konečný úsek horní končetiny, který začíná zápěstím a končí prsty. Velikost ruky, rozsahy pohyblivosti funkčních struktur ruky jsou faktory ovlivňující její úchopové a silové schopnosti a možnosti. Dominantnost ruky pak rozděluje lidi na praváky a leváky, což mnohdy vede ke komplikacím při používání nářadí nebo při uspořádání ovládacích prvků na zařízení apod., aby to vyhovovalo pro obě dominantní ruky.
Vlastnosti ruky jsou studovány řadou vědních oborů. Mezi tyto vědní obory se řadí především antropometrie, anatomie a fyziologie. Vědecké poznatky z nich jsou uplatňovány v ergonomických a bezpečnostních normách. Ruka při práci je bohužel nerozlučně spjata s jejím možným ohrožením na zdraví. Proto preventivní ochrana zdraví rukou je nezbytnou nutností. Dbát o zdravé a čisté ruce je vizitkou člověka.
Lidská ruka, která je úžasným aparátem, dokáže prakticky dělat, co se nám zachce – pracovat, jíst, hrát na hudební nástroj apod., dokonce není výjimečné, že lidé s její pomocí i „mluví“, přičemž gestikulace (pozitivní i negativní) rukou je běžnou záležitostí ve společenském životě člověka.
Je zřejmé, že pro osvojování si poznatků o ruce z hlediska její stavby, funkčních vlastností a narušování zdraví by vyžadovalo hlubšího studia. Proto další nezbytný popis poznávání a užití ruky bude mít praktičtější zaměření.
1. Ruka zohledněna v antropometrických, anatomických a fyziologických charakteristikách a zdravotních aspektech
1.1 Vymezené přístupy k řešené problematice
Ruka z antropometrického hlediska je složitý útvar, jehož elementární rozměry, tj. délky, šířky a hloubky, se statisticky vyznačují individuálními rozměry mezi rukama mužů a žen. Tato skutečnost ovlivňuje, v široké variabilitě různých druhů úchopů ruky při ruční práci. To pochopitelně výrobně ovlivňuje konstrukční tvary i velikosti ručně ovládaných prvků (ovladačů, pák, volantů), nástrojů, nářadí, případně velikosti i co do hmotnosti manipulovaných předmětů.
Pro znalosti anatomické stavby ruky jsou důležité rozsahy pohyblivosti ruky v jejich jednotlivých kloubech a její omezenosti.
Z fyziologického hlediska při taktilním kontaktu ruky s ovládanými prvky jsou důležité maximální přípustné tlaky na volární (dlaňové) straně ruky a přilehlých partiích a to nejen statické jako funkce času, po který má být tlak zachycován, ale i dynamické. S tím souvisí i problém, do jaké míry měrný tlak může dlaň snést při využití maximální plochy dlaně s podílem palce a prstů, při úchopu předmětu.
Lidská ruka z hlediska kinematiky představuje složitý řídicí systém se zpětnými vazbami. Přesnost a rychlost pohybu ruky není určena jen vlastnostmi svalové tkáně a její strukturou, ale hlavně charakteristikami procesu oběhu řídicí informace (časového cyklu regulace, dobou přenosu, strukturou řídicích signálů atd.) až k dosažení požadovaného efektu. Díky organizaci regulačních vzájemných působení ruky na ovládací prvek, na základě signálu zpětné vazby, se nadbytečné stupně volnosti při jejím pohybu mění na pohyby koordinované. Časem se tak mohou vypěstovat pohybové stereotypy ruky, například při ovládání strojního zařízení (stroje) pomocí ovladačů.
Zachovat zdraví a bezpečnost při práci rukou předpokládá dodržovat pravidla, která mají zajistit prevenci pracovních úrazů a nemocí.
1.2 Antropometrické rozměry ruky
Velikost rozměru ruky je u lidí různá, a je závislá zejména na pohlaví a věku. Rozměry ruky je nutno brát v úvahu například při uchopení, držení a přenášení předmětů (břemen), při navrhování ovládacích prvků u strojů, při řešení velikosti bezpečnostních otvorů apod. Základní rozměry lidského těla uvádí ČSN EN ISO 7250-1. V tabulce 1 jsou rozměry ruky uváděny v percentilech.
Obr. 1 Základní rozměry horní končetiny – ruky
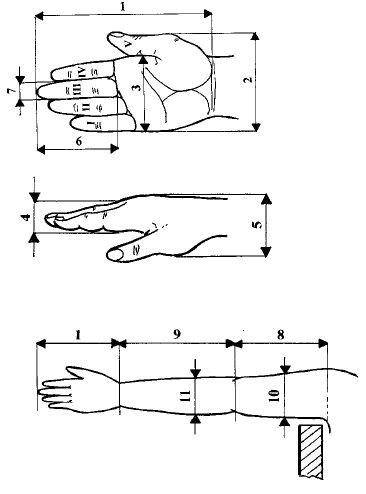
Tabulka 1 - Základní rozměry horní končetiny – ruky (viz obr. 1)
| Číslo znaku | Popis znaku | Percentily | ||
|---|---|---|---|---|
| P5 | P50 | P95 | ||
| 1 | Délka ruky | 175 | 188 | 205 |
| 2 | Šířka palce | 92 | 112 | 120 |
| 3 | Šírka ruky dlaňová | 80 | 100 | 112 |
| 4 | Tloušťka ruky v dlani | 26 | 30 | 33 |
| 5 | Tloušťka ruky u palce | 43 | 50 | 56 |
| 6 | Délka III. prstu (prostředníku) | 72 | 81 | 90 |
| 7 | Šířka III. prstu | 15 | 19 | 23 |
| 8 | Délka nadloktí | 250 | 320 | 350 |
| 9 | Délka předloktí (paže) | 170 | 250 | 265 |
| 10 | Průměr nadloktí | 115 | 118 | 121 |
| 11 | Průměr předloktí | 114 | 118 | 120 |
1. Rozměry pro antropometrické znaky jsou v mm.
2. Percentil P 50 udává průměrnou,
P 5 nejmenší a
P 95 největší rozměr ruky.
1.3 Anatomická skladba ruky a její fyziologické vlastnosti
Ruka člověka je složitý anatomický útvar, fyziologicky zdatný. Její dar zručnosti a síly se stává důležitou vlastností nezbytnou v každé manipulační činnosti. Základní funkcí ruky je schopnost úchopu umožněná díky palci protistojnému oproti ostatním prstům.
Lidská ruka obsahuje všechny důležité anatomické struktury: kosti, svaly, šlachy, vazy, nervy i tepny. Horní končetina se skládá z 29 kostí a stejného počtu hlavních kloubů. Kosti jsou připojeny k šlachám a jsou ovládány 35 silnými svaly, jejichž činnost kontroluje 48 nervů.
Ruka, zapojená do úchopových možností, se skládá ze zápěstí, dlaně a pěti prstů (viz obr. 1). Prst je jeden z pěti pohyblivých útvarů zakončujících dlaň ruky. Každý prst má tři články (palec však má jen dva) a je zakončen nehtem. Nehet je tvrdé zakončení prstů, které slouží jako ochrana a prostředník přenosu tlaku na prsty s okolím. Na spodní části prstů jsou otisky (papilární linie), které jsou pro každého člověka jedinečné a slouží k tomu, aby předmět držený v rukou neklouzal. Konečky prstů mají největší koncentrací receptorů tlaku a teploty.
Ruku můžeme rozdělit do tří skupin. První skupinu tvoří palec, druhou skupinu 2. a 3. prst, třetí skupinu tvoří 4. a 5. prst. Palec oproti ostatním prstům je schopen opozice, tj. schopnost palce dosáhnout přes dlaň až ke konečkům dalších prstů, což má význam pro úchopovou funkci ruky. Nejdůležitější pohyby ruky se dějí mezi palcem a 2. a 3 prstem, 4. a 5. prst jsou spíše pomocným podpůrným činitelem.
Ruka prsty a zápěstím umožňuje provádět velké množství pohybů, mezi něž patří: pokrčení a natažení prstů; roztažení a přitažení prstů, opozice palce (pohyb palce směrem k malíku), opozice malíku (pohyb malíku směrem k palci), ulnární dukce (pohyb v zápěstí za malíkem) a radiální dukce (pohyb v zápěstí za palcem); dorzální flexe (ohnutí zápěstí směrem za hřbetem ruky) a palmární flexe (ohnutí zápěstí směrem za dlaní), ohyby a kroužení zápěstím (na tomto pohybu se podílí i předloktí).
Z fyziologického hlediska, při kontaktu ruky s předmětem (např. ovládačem), jsou důležité hodnoty maximálně přípustné tlaky na dlaňové straně ruky a přilehlých partiích a to nejen statické jako funkce času, po který má být tlak zachycován, ale i dynamické. S tím souvisí i problém do jaké míry měrný tlak může dlaň snést, aniž by docházelo při daném úchopu předmětu k jeho prokluzování, případně k vytváření nežádoucích puchýřů či mozolů.
Lidská ruka v činnosti, z hlediska kinematiky, představuje složitý řídicí systém se zpětnými vazbami. Přesnost a rychlost pohybu ruky není určena jen vlastnostmi svalové tkáně a její strukturou, ale hlavně charakteristikami procesu oběhu řídicí informace, která se v podstatě děje cestou reflexního oblouku. Díky organizaci regulačních vzájemných působení ruky na předmět, na základě signálu zpětné vazby, se nadbytečné stupně volnosti při jejím pohybu mění na pohyby koordinované. Časem se tak mohou vypěstovat pohybové stereotypy ruky, například při ovládání strojního zařízení (stroje) pomocí ovladačů.
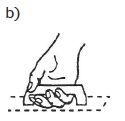
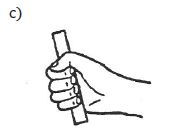
Uchopením předmětu rozumíme (podle ČSN EN 1005-1) způsob, kterým může být s předmětem zacházeno (držení a/nebo pohyb rukama); použitý způsob uchopení (například sevření, zaháknutí, sílou); jeho celkové uspořádání a místo uchopení (vhodný držák, rukojeť) ve vztahu k povaze (typu) úkolu a předmětu, s nímž je manipulováno. Způsobem uchopení lze určovat stupeň obtížnosti manipulace. Úchopy jednou rukou jsou limitovány rozměrem předmětu (např. velikostí průměru koule, velmi plochými předměty – mince apod.). V případě potřeby uchopení rozměrnějšího předmětu či k udržení jeho stability musí vypomoci ruka druhá.
Přehled základních typů úchopů a jejich zobrazení
- uchopení sevřením – uchopení sevřením palce a ukazováku;
- uchopení zaháknutím – aktivní jsou všechny prsty, palec má pasivní úlohu;
- uchopení vyžadující sílu – prsty a palec jsou v poloze proti sobě, svírají předmět tak, aby byl umožněn maximální kontakt s plochou dlaně.

Základní druhy pohybů (rozsah je omezen šlachy a vazy obepínající kloub)
- flexe – ohýbání zápěstí, prstu;
- extenze – napřimování, opak flexe;
- abdukce – roztažení prstů;
- addukce – přitažení, opak abdukce;
- pronace – stočení, např. stočení předloktí dovnitř (odemykání klíčem);
- supinace – vytočení, opak pronace;
- cirkumdukce – kroužení horní končetiny, prsty (složený pohyb);
Základní typy pohybů ruky jsou většinou omezeny rozsahem pohyblivosti zápěstí a prstů.
Mezi anatomické pohyby ruky, které jsou časově měřitelné, se řadí: sáhnout, uchopit, držet, přemístit, vypustit, položit, oddělit, obrátit, otočit, tlačit.
Dynamika pohybů a silového účinku ruky umožňuje její svalstvo a kinematika kloubového spojení. Dynamika pohybu ruky je řízena nervovou soustavou (na principu reflexního oblouku). V jednom kloubu může probíhat současně tolik jednotlivých pohybů, kolik má daný kloub stupňů volnosti.
Stupně volnosti horní končetiny – ruky
Měřeno od ramenního kloubu po konec všech prstů činí 27 stupňů volnosti
RK(2) <--> LK(1) <--> Z(2) <--> DLAŇ (2) + paže (1) předloktí (2) + PRSTY (4x4) + P(3+1)/ / ruka /
Číslo v závorce určuje počet stupňů volnosti. RK – ramenní kloub; LK – loketní kloub; Z – kloub zápěstí; P – palec. Ruka včetně zápěstí má celkem 22 stupňů volností.
1.4 Ruka vystavená poškození zdraví a nápravná opatření
Není člověka, který by neměl byť sebemenší povrchové (kožní) poranění či jiná onemocnění ruky. Běžná i závažná poranění a úrazy ruky se vyskytují v profesionálním, rekreačním, sportovním a domácím prostředí. Podle SÚIP vzniklo v roce 2015 na 41 000 úrazů, z nichž každý čtvrtý případ postihl ruce nebo paže. Méně úrazů připadá na kancelářské pracovníky, manažery a vědecké pracovníky. Je třeba si uvědomit, že pracovní činnosti vykonávané rukama jsou významným rizikem narušení zdraví ruky.
Pracovním úrazem ruky (v souladu se zákoníkem práce č. 262/2006 Sb.) se rozumí poškození zdraví anatomických struktur ruky, ke kterému dochází nezávisle na vůli pracovníka náhlým a silovým působením zevních vlivů při plnění pracovních úkolů.
Mezi typické úrazové události ruky se řadí: drobná povrchová poranění (říznutí, bodnutí, zhmoždění), otevřené tržné rány (seknutí, rozdrcení), popálení a opaření, zlomenina zápěstí a prstů, amputace celé ruky nebo prstů. Dlouhodobým nadměrným tlakem působení na ruku vznikají, zejména na dlani a prstech, otlaky, mozoly a puchýře.
Nemoci z povolání, vztažené na ruce, jsou nemoci vznikající nepříznivým působením vlivů: chemických (např. poleptání kůže škodlivou látkou) a fyzikálních (např. vibrace, horké a studené povrchy či tekutiny, útlaky na nervy a cévy).
K dosahování zlepšení nebo zpomalení zhoršování zdraví ruky, ve vykonávaných činnostech, spočívá v preventivním opatření, které lze členit na:
- Opatření technologická a technická.
Jde o přizpůsobení pracovního procesu, co do rychlosti, frekvence, síly, možnostem a schopnostem ruky pracovníka. Zohlednit velikost a tvar ovládaných prvků antropometrickým rozměrům a anatomii ruky. - Opatření organizační.
Jde o přiměřenost doby práce a odpočinku ruky, tak aby pro daný typ úchopu ovládaného prvku nedocházelo při zátěži ke škodlivým projevům ve zdravotním stavu ruky. - Opatření spočívající v používání ochranných pracovních prostředků.
Jde o správný výběr rukavic pro odpovídající charakter vykonávané práce rukou. - Provádění preventivních lékařských prohlídek.
Jde o jednu z prohlídek za účelem předcházet nemocem z povolání, týkající se také ruky.
2. Ruka hodnocená při práci podle ergonomických a bezpečnostních hledisek
Vybrané příklady, pro zapojení ruky do pracovního procesu, názorně dokumentují možné praktické užití ruky popisované v normativních odkazech ergonomické a bezpečnostní povahy, navazující na předchozí charakterizované poznatky o ruce.
2.1 Základní typy úchopů ruky
Rozsah variant způsobů úchopů u ovládačů je poměrně užší, než je tomu u ručního nářadí a nástrojů nebo dokonce u úchopů při manipulaci různých předmětů (břemen).
Při ruční manipulaci s předměty se používají různé druhy úchopů, které se určují především rozsahem a způsobem účasti jednotlivých částí ruky, tj. prstů a dlaně v různých kombinacích se zohledněním zda palec obemyká předmět souhlasně nebo protisměrně vzhledem k ostatním prstům. V praxi se běžně používají různé druhy úchopů: různé varianty stisku, zaháknutí prsty, pevné sevření (příklad ukázky je uveden v předchozí kapitole).
Tabulka 2 Specifikace charakteristik uchopení u ovládačů (k obrázku 2)
(Podle ČSN EN 894-3+A1)
| Charakteristiky uchopení | Interakce s ovladačem | Poznámka | ||
|---|---|---|---|---|
| Typ uchopení | dotyk | stisk | sevření | Viz. obr. 2 |
| Část ruky vyvíjející sílu | prst | ruka | ||
| Způsob působení síly | normálové | tangenciální | ||
Dotyk – tam, kde je používána jednostranná síla vyvíjená prstem, palcem nebo¨ rukou na ovládač.
Stisk – tam, kde je uchopení prsty a/nebo palcem, aniž by byly sevřené v pěst.
Sevření – tam, kde jsou všechny prsty sevřeny (kolem ručního ovládače).
Obr. 2 Úchopové možnosti ruky
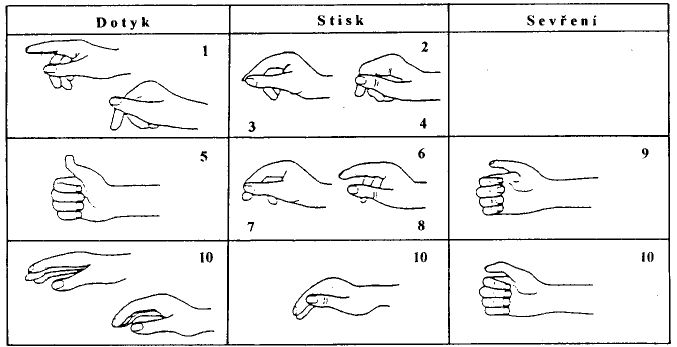
Legenda
1 Prst
2 Dva prsty
3 Palec proti prstu
4 Palec v pravém úhlu
5 Palec
6 Tři prsty
7 Rovnoměrně vzdálené
8 Palec proti
9 Prsty
10 Ruka
2.2 Charakteristické údaje při užití ovládačů
Ručním ovládačem se rozumí ovládač nastavovaný nebo ovládaný rukou, jehož změnou polohy dojde k určité změně funkce ovládaného zařízení. Pro zajištění bezpečné a účinné činnosti ručních ovládačů je důležitý jejich správný výběr. Při užití ručních ovládačů je třeba respektovat specifické požadavky obsluhy a úkolu:
- vizuální kontroly nastavení,
- potřeba hmatové kontroly,
- zabránit sklouznutí ruky (tření),
- potřeba nošení rukavic.
K dispozici je celá řada nejrůznějších typů ručních ovládačů. Každý typ je vhodný pro určité požadavky úkolu a pro určité schopnosti obsluhy. Jejich výběr ovlivňuje řada faktorů, jako je velikost a tvar ovládače, charakteristiky uchopení, pohyby a síly, uživatelská populace, pracovní prostředí (osvětlení, vibrace). Přípustné silové zatížení ruky uvádí tabulka 4.
Tabulka 4 Přípustné síly ruky pro ruční ovládače (podle ČSN EN ISO 894-3+A1)
| Typ ovladače minimální a maximální síly (N) | Tvar, poloha a frekvence ovládání | Způsob ovládání |
|---|---|---|
| Tlačítko | Kruhové, čtvercové, obdélníkové, hřibové | Jedním prstem min. 2,5 max. 8 dlaní min. 2,5 max. 50 |
| Přepínač páčkový | Válcový, kuželový, hranolový dvoupolohový: min. 30° na strany od svislé osy, třípolohový: min 30° na strany od svislé osy a kolmo k základně |
Prsty min. 2,5 max. 10 |
| Přepínač otočný | Kruhová základna, úchopová část kuželová, obdélníková při zrakové kontrole: max. počet poloh - 24, minimální úhel mezi polohami - 15°; při hmatové kontrole: max. počet poloh - 8, minimální úhel mezi polohami - 45° |
Prsty min. 2,5 max. 15 |
| Točítko | Válcový, kuželový průměr do 2,5 cm průměr větší než 2,5 cm |
Prsty min. 2,5 / max. 4 min. 2,5 / max. 15 |
| Kolo ruční | Vnější průměr věnce se volí podle rychlosti otáčení; při větší rychlosti menší průměr | Jednou rukou min. 10 / max. 100 Oběma rukama min. 10 / max. 200 |
| Volant | a) technické zařízení pracovně nepojíždějící; b) technická zařízení pracovně pojíždějící; c) všechna technická zařízení při selhání posilovače řízení (při nouzovém řízení) |
Oběma rukama max. 115 Jednou nebo oběma rukama max. 80 Oběma rukama max. 350 |
| Páka ruční | Rukojeť: válcová, kuželová, kulová trvale: často: zřídka: |
Horní končetinou pohyb páky: vpřed a vzad min. 10 max. 60 do stran. min. 10 max. 40 vpřed a vzad min. 10 max. 120 do stran min 10 max. 80 nahoru a dolů min. 10 max. 300 Nouzová a parkovací brzda max. 295 |
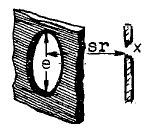
2.3 Dosahy ruky přes pravidelné otvory
V tabulce 3 jsou uvedeny bezpečné vzdálenosti sr pro osoby, jak v produktivním věku tak děti od věku 3 let a vyšším, což je dílčím způsobem rozlišeno (a, b).
Tabulka 3 - Dosahy ruky přes pravidelné otvory (podle ČSN EN ISO 13857)
| Poř. čís. | Část těla | Otvor | Bezpečná vzdálenost - sr | |||||
|---|---|---|---|---|---|---|---|---|
| štěrbina | čtverec | kruh | ||||||
| a | b | a | b | a | b | |||
| 1 | Špička prstu (obr. 1a) |
e<=4 | =>2 | =>2 | =>2 | =>2 | =>2 | =>2 |
| 4<=e<=6 | =>10 | =>20 | =>5 | =>10 | =>5 | =>10 | ||
| 2 | Celý prst až ke kořenu nebo ruka (obr. 1b) |
6<=e<=8 | =>20 | =>40 | =>15 | =>30 | =>5 | =>20 |
| 8<=e<=10 | =>80 | =>80 | =>25 | =>60 | =>20 | =>60 | ||
| 10<=e<=12 | =>100 | =>100 | =>80 | =>80 | =>80 | =>80 | ||
| 12<=e<=20 | =>120 | =>9002) | =>120 | =>120 | =>120 | =>120 | ||
| 20<=e<=30 | =>8501) | =>900 | =>120 | =>120 | =>120 | =>120 | ||
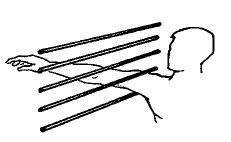
| 3 | Paže až po ramenní kloub (obr. 1c) |
20<=e<=30 | =>850 | =>900 | =>120 | =>550 | =>120 | =>120 |
| 30<=e<=40 | =>850 | =>900 | =>200 | =>550 | =>120 | =>120 | ||
| 30<=e<=100 | =>850 | =>900 | =>200 | =>900 | =>200 | =>900 | ||
| 40<=e<=120 | =>850 | =>900 | =>850 | =>900 | =>850 | =>900 | ||
Sloupek: a – platí pro osoby ve věku 14 let a vyšším; b – platí pro osoby ve věku 3 let a vyšším
1) Jestliže je délka štěrbinového otvoru L 65 mm, palec omezuje vniknutí (viz obr. 1b) a bezpečná vzdálenost může být snížena na 200 mm.
2) Jestliže je délka štěrbinového otvoru L 40 mm, palec omezuje vniknutí (viz obr. 1b) a bezpečná vzdálenost může být snížena na 120 mm.
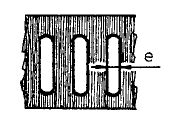
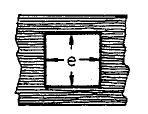
Tvary otvorů s charakteristickými rozměry: (vyobrazení k tabulce 3)
1. Dosah špičky prstu (obr. 1a)
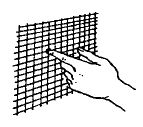
2. Dosah ruky (obr. 1b)

3. Dosah horní končetiny (paže) (obr. 1c)
štěrbina
čtverec
kruh
Závěr
Ruka pro člověka, je nezbytným orgánem, která slouží k funkcím motorickým – manuálním, senzorickým – hmatem, komunikačním – sociálním kontaktem. Z pohledu legislativy a norem je ruce věnována pozornost z ergonomického, bezpečnostního a zdravotního hlediska. Ruka, je složitý nástroj, který máme neustále k dispozici, bez níž si nedovedeme představit aktivní život. Ruka svou výdělečnou činností je živitelkou rodiny. Aby ruka mohla plnit všechny funkce, které po ní požadujeme, musí být zdravá. Protože ruka, ať si to více či méně uvědomujeme, je v neustálém ohrožení, proto buďme pozorní. Věnujme ruce veškerou péči a chraňme ji před možnou újmou na zdraví. Zaslouží si to.
Literatura
- Král, M. Ergonomie a její využití v technické praxi. IVBP – VAVA, Ostrava, 1994
- Fleischmann, J. Anatomie člověka. SPN, Praha, 1964
- Zákon č. 262/2006 Sb., zákoník práce
- ČSN EN 349 +A1 (83 3211) /12/2008/ Nejmenší rozměry k zamezení stlačení částí lidského těla
- ČSN EN ISO 13857 (83 3212) /09/2008/ Bezpečnostní vzdálenosti k zamezení dosahu do nebezpečných prostor horními a dolními končetinami
- ČSN EN 547-1až 3+A1 (83 3502) /05/2009/ Tělesné rozměry
- Část 1: Zásady stanovení požadovaných rozměrů otvorů pro přístupy celého těla ke strojnímu zařízení
- Část 2: Zásady stanovení rozměrů požadovaných pro přístupové otvory
- Část 3: Antropometrické údaje
- ČSN EN 1005- 2 +A1 (83 3503) /04/2009/ Fyzická výkonnost člověka
- Část 2: Ruční obsluha strojního zařízení a jeho součástí
- ČSN EN ISO 7250-1 (83 3506) /10/2010/ Základní rozměry lidského těla pro technologické projektování
- Část 1: Definice a orientační body tělesných rozměrů
- ČSN EN 894-3+A1 (83 3585) /05/2009/ Ergonomické požadavky pro navrhování sdělovačů a ovládačů
- Část 3: Ovládače